
So, the extreme delay in new blog posts is because, in addition to all my projects on the Hyrel, I’m building a printer from a kit in my spare time! Specifically, this printer. I’ve always wanted a delta printer because I heard incredibly good things about the level of accuracy and resolution that they have to offer. Yes, that’s true, it’s not explicitly related to doing projects with my Hyrel printer, but I wanted as a good way to expand my knowledge about the real low-level aspects of 3d printing (assembly, gcode, etc) so I could better understand how other printers (like the hyrel) run.
It has been such an incredibly learning experience thus far! Basically, I started with nuts, bolts, and a whole lot of extruded metal haha… Then, throughout the course of the past week, thanks to the help of an awesome friend (you know who you are 😉 ), my 3d printer began to take shape! It took 5 hours to get the base of the printer put together (so many nuts in so many tight spaces)…. Then everything had to be assembled from scratch (the electronics, motors, z axis poles, belts, head arms, head itself, etc. Now, I am almost at the point where I have a complete printer! Just have to work out how to mount the nozzle fan to the whole assembly. So, without further ado, I present my delta printer!
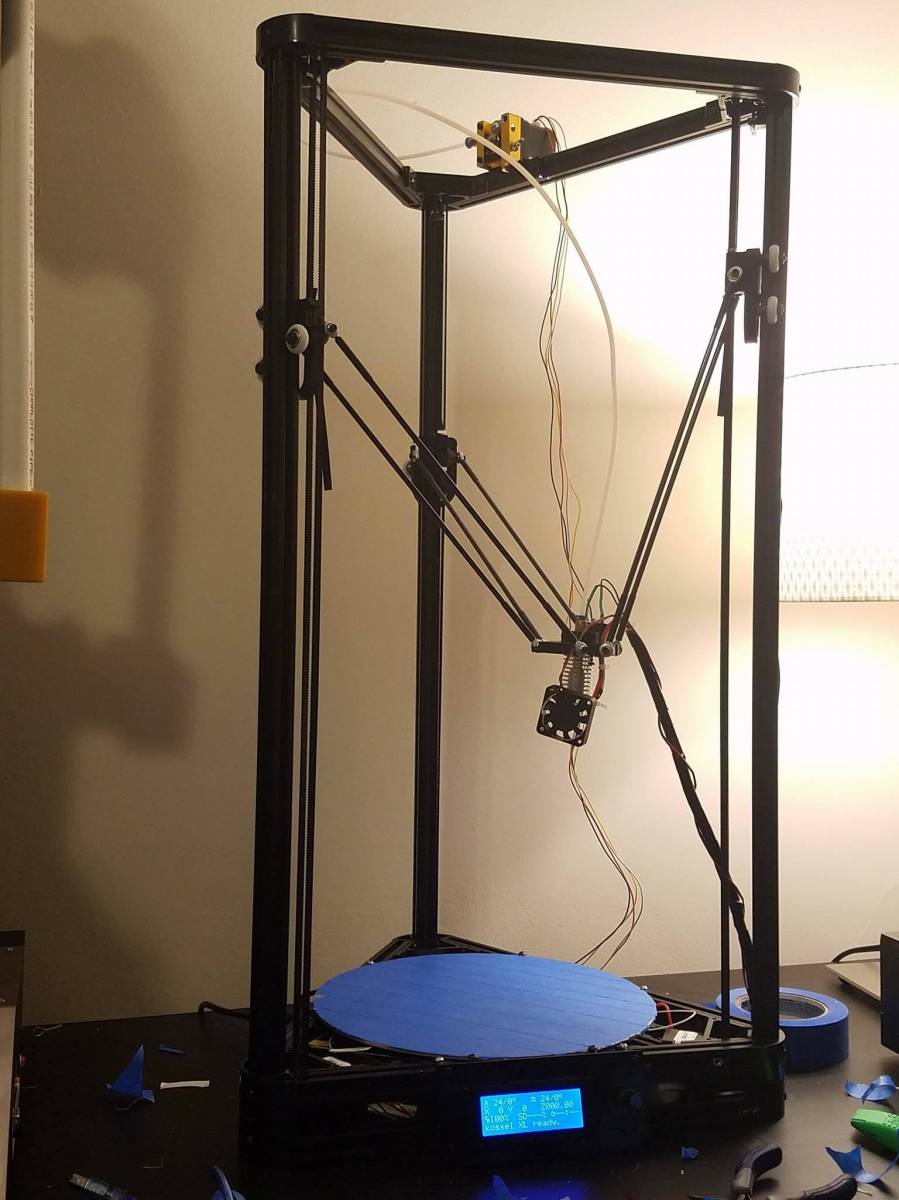
It truly is a gigantic monster with its 10.6″ diameter buildplate and 14.5″-ish build height!
So, now for the important part: what I learned so far!
The biggest thing was GCODE (the underlying machine code that makes 3d printing possible). I now understand G28 (auto home), G29 (auto level), G1 (movement), M206 (offsets), M500 (store to eeprom), M501 (check eeprom), M119 (check sensors and whether they are triggered or not), and more that I can’t remember right now! Before, I knew nothing about GCODE and what the different instructions meant.
The other thing I learned was about bowden vs direct drive systems, which is a huge difference! Basically, with a bowden drive system, all the weight of the motor that pushes the filament through the head is removed from the head itself, and the motor feeds the filament through a tube instead. Looking at the Kossel picture, you can see that the filament drive system is on top of the printer instead of on the head. The big advantage of this is that it reduces the amount of mass that needs to be moved when the head moves. However, bowden extruders tend to do worse with flexible filaments, so there are definitely pluses and minuses to any setup. I have yet to do a test print yet, but we will get there for sure!
So to recap on all the blog projects to watch out for in coming posts, I have:
1.) The 3d-printed stool.
2.) Making Cura work with my Hyrel.
3.) Finishing my delta printer and doing a test print.
There’s plenty to look forward to in the future and plenty to write about, so as always, stay tuned, and Thanks for continuing to read!
John (aka the Mad Printer)
